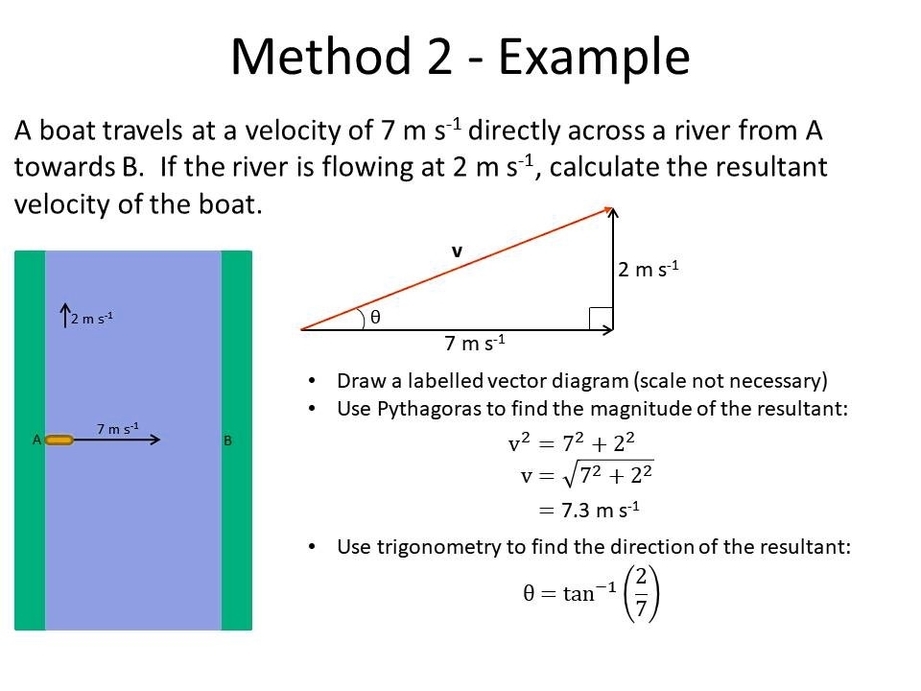
Calculating Resultant Vectors Posted on April 9, 2024 by chartdiagram Calculating Resultant Vectors: Calculating resultant vectors involves determining the combined effect of multiple vectors, using techniques like vector addition and the Pythagorean theorem to find magnitude and direction.